
Unser AFM-Aufbau
Der Aufbau eines Rasterkraftmikroskops ist vom Prinzip her nicht schwierig zu verstehen. Im Wesentlichen benötigt man
- eine Messeinheit, die in unserem Fall aus dem System aus Cantilever, Faser, Laser und Fotodiode besteht
- ein Positioniersystem, d.h. ein Positioniertisch, der sich in alle drei Raumrichtungen verfahren lässt. Idealerweise sollte er einen gewissen groben Verfahrweg sowie einen sehr feinen, für den 'Nanobereich' geeigneten, ermöglichen. Mit diesem Positioniersystem wird die Probe dann unter der stillstehenden Messnadel in einem Rasterverfahren durchgefahren (Man bewegt also die Probe, nicht die Nadel).
- eine Elektronik + Software zur Datenaufnahme und -verarbeitung.
Was so einfach klingt, hat natürlich auch seine Tücken, denn die Anforderungen an die einzelnen Komponenten sind hoch: Da sich alles in den winzigen Dimensionen der Nanowelt abspielt müssen die Geräte sehr empfindlich, aber auch stabil sein, so darf z.B. der Positioniertisch, auf dem die Probe sitzt, beim Verfahren nicht ruckeln oder sich unpräzise bewegen - beim Abscannen von Oberflächen mit wenigen Nanometer hohen Strukturen wäre das fatal für die Messung. Desweiteren muss alles auf µm hin justierbar sein, wie beispielsweise die Ausrichtung der Faser über der Messnadel.
Abb. 1 zeigt den Messaufbau unseres AFM-Prototypen. Der Laser, Elektronik-Komponenten und der Photodiodendetektor sowie andere hilfreiche Geräte, die wir in dem Zusammenhang verwenden, wie ein Oszilloskop und ein Funktionsgenerator, sind nicht im Bild.
|
Abb. 1: AFM - Aufbau: Unser Prototy |
Die einzelnen Komponenten sind:
|
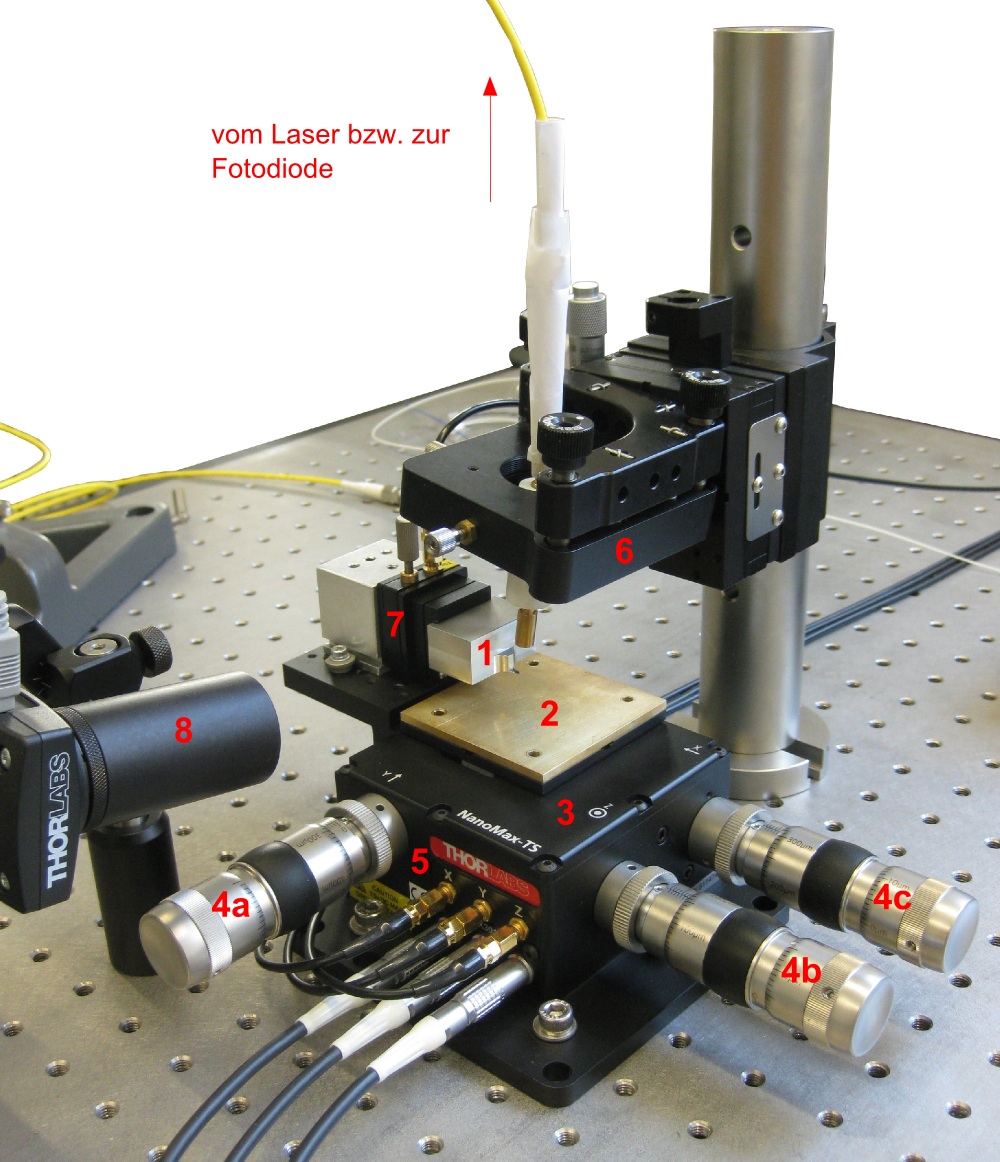
Die Funktion all dieser Komponenten dürfte relativ klar sein. Der Cantilever sitzt auf dem Cantileverhalter (1), über ihm ist die optische Faser, die sich in einem verstellbaren Halter (6) befindet, ausgerichtet. Aus ihr tritt der Laserstrahl aus bzw. dessen Reflexion wieder ein. Wie im vorigen Kapitel über das Messprinzip erklärt wurde, findet hier die eigentliche Aufnahme des Signals statt. Die Probe, die auf den Probentisch (2) gelegt wird, wird mit den Differenzialschrauben (4) zunächst grob in die richtige Position gebracht, d.h. an die Stelle, die gemessen werden soll. Für die eigentliche Messung wird die Bewegung der Probe auf dem Positioniertisch aber über eine Software gesteuert. Die Software gibt zunächst elektronischen Controllern (nicht im Bild) Befehle, die daraufhin die Bewegung des Tisches steuern, die Anschlüsse dieser sind im Bild bei (5) zu sehen. Die eigentliche Bewegung wird dann durch sog. Piezoaktuatoren ausgeführt. Diese kleinen Motoren sind im Prinzip kleine Kristalle, die sich beim Anlegen einer Spannung verformen. Die gewünscht Spannung und damit der gewünschte Verfahrweg wird durch die Controller gesteuert. Diese Verformung geschieht sehr linear und lässt sich präzise steuern, weshalb diese Art des Antriebs die Methoder der Wahl ist, wenn es um Verstellwege in solch kleinen Dimensionen geht.